Multimodal agents have demonstrated strong performance in general GUI interactions, but their
application in automotive systems has been largely unexplored. In-vehicle GUIs present distinct
challenges: drivers’ limited attention, strict safety requirements, and complex location-based
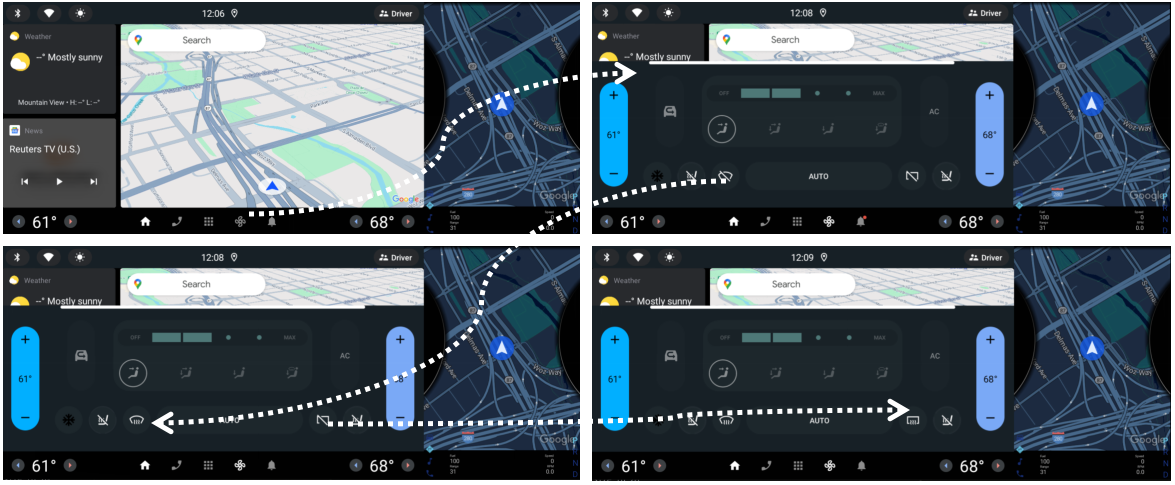
interaction patterns. To address these challenges, we introduce Automotive-ENV,
the first high-fidelity benchmark and interaction environment tailored for vehicle GUIs.
This platform defines 185 parameterized tasks spanning explicit control,
implicit intent understanding, and safety-aware tasks, and provides structured multimodal
observations with precise programmatic checks for reproducible evaluation. Building on this
benchmark, we propose ASURADA, a geo-aware multimodal agent that integrates
GPS-informed context to dynamically adjust actions based on location, environmental conditions,
and regional driving norms.
Experiments show that geo-aware information significantly improves success on safety-aware tasks,
highlighting the importance of location-based context in automotive environments. We will release
Automotive-ENV, complete with all tasks and benchmarking tools, to further the development of
safe and adaptive in-vehicle agents.